Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Fusce aliquam hendrerit lacinia. Nulla pulvinar ultricies mi et fringilla. Curabitur blandit metus ut magna consequat dapibus. Vestibulum vel urna eget ante tempor sollicitudin. Quisque iaculis scelerisque vehicula. Duis vitae viverra quam. Nullam facilisis nulla vitae elit pretium dignissim. Pellentesque ut lacinia erat. Quisque tempus fermentum elit non aliquam. Nullam in porttitor enim, et egestas dolor.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Multi-robot systems consensus animations 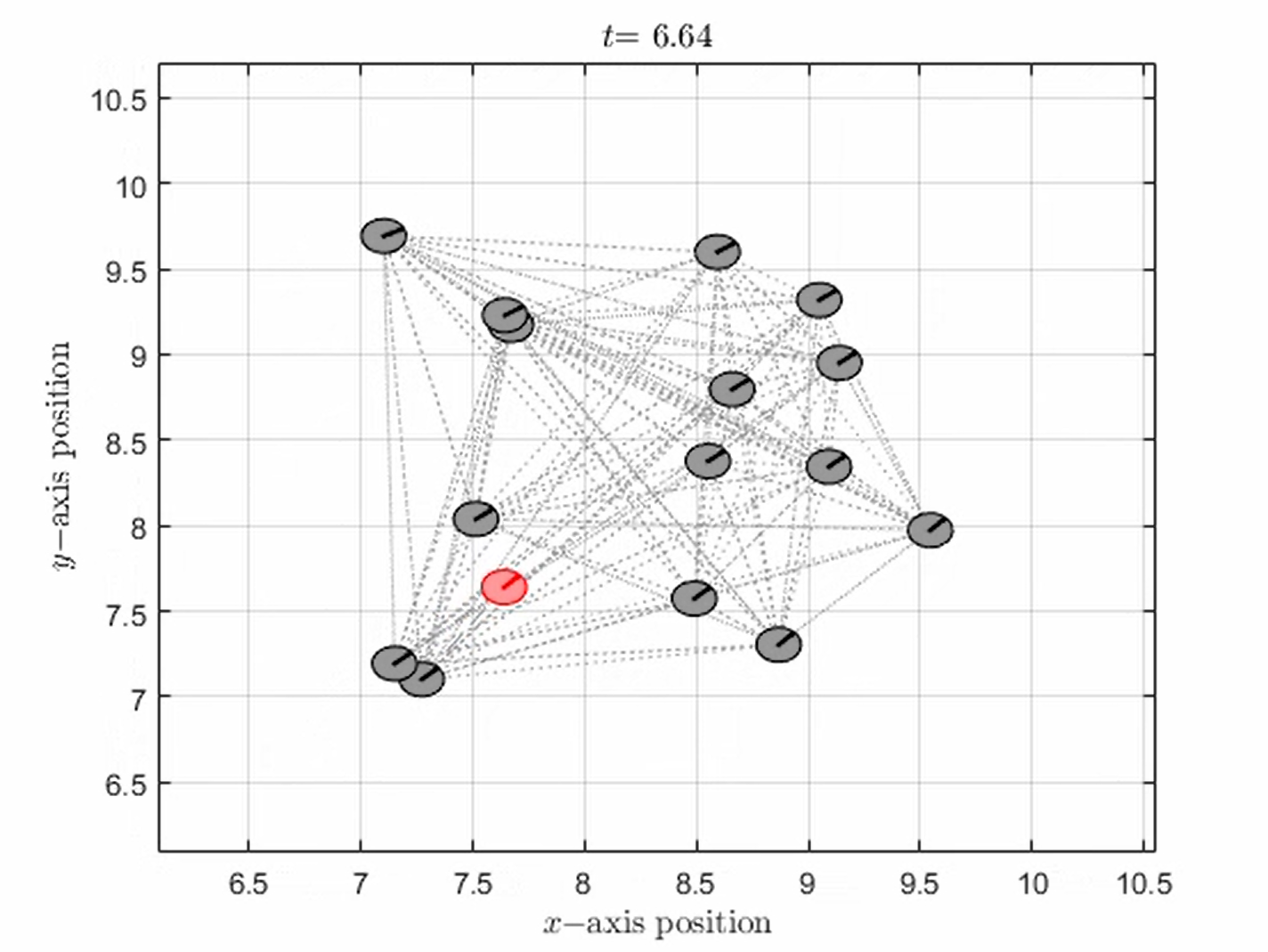
Multi-robot systems flocking motion animations 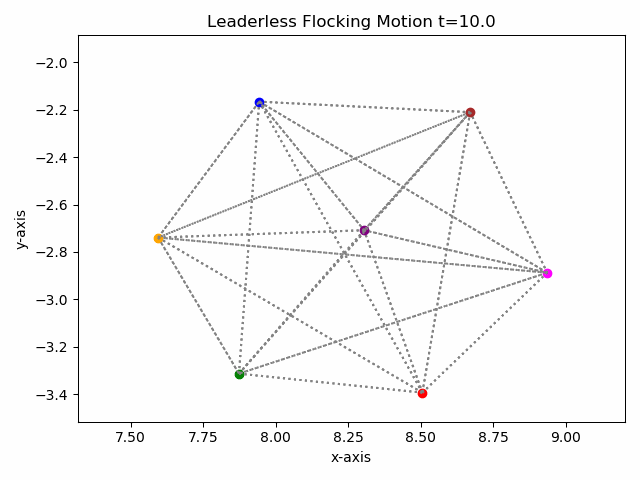
Published in Congreso Nacional de Control Automático (AMCA2017), 2017
Se proponen dos algoritmos para resolver el problema de consenso en un sistema de múltiples agentes inerciales. En el primero, se logra el consenso a una posición fija dada por el líder virtual. El segundo protocolo resuelve el problema para una referencia variable en el tiempo descrita como el movimiento del líder virtual. Los resultados disponibles en la literatura se extienden para considerar la dependencia de la estabilidad del seguimiento del líder virtual en la ganancias de control y la estructura de comunicación del sistema. La efectividad de los protocolos propuestos se ilustran mediante simulaciones numéricas.
Recommended citation: Eber Jafet Ávila-Martínez and Juan Gonzalo Barajas-Ramírez. (2021). "Consenso con líder virtual en sistemas de múltiples agentes inerciales" Congreso Nacional de Control Automático, 2017.
Published in IFAC-PapersOnLine, 2018
We propose two distributed controller solutions to the leader-followers consensus problem on inertial multiagent systems with guarantee connectivity preservation based on artificial potential functions. On the first one, we consider a virtual leader with constant velocity, in this case consensus is defined as a position reference to be tracked. On the second, the leader’s velocity is time-varying. In both cases, we consider that only a subset of agents have access to leader’s state information. Effectiveness of proposed controllers is illustrated with numerical simulations.
Recommended citation: Eber Jafet Ávila-Martínez and Juan Gonzalo Barajas-Ramírez. (2018). "Distributed control for consensus on leader-followers proximity graphss" IFAC-PapersOnLine. 51(13).
Published in 2018 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), 2018
In this paper, a multipoint power quality monitoring system is presented. The designed system is versatile and consist of one or more standalone portable power monitoring devices with database server capability and local/remote visualization of the power quality indicators such as harmonics, total harmonic distortion, power factor, among others. The portable monitoring devices can measure, record and share information about power quality indicators. A feature of the proposed system is its capability to measure, record data regularly for an extended period and share information. A waveform reconstruction of the measured variables such as voltage, current, active, reactive and apparent power of a 3-phase power line can be performed with the acquired data. Also, each power monitoring device can detect power quality disturbances as well as generate alarms. The developed system has an open architecture; therefore, its functionality can be improved, adapted and scaled for research, educational, institutional or commercial purposes.
Recommended citation: Irwin A. Díaz-Díaz, Eber Jafet Ávila-Martínez and Martín Rodríguez-Licea. (2018). "Multipoint Power Quality Monitoring System" 2018 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC).
Published in Journal of the Franklin Institute, 2021
Motivated by the existing work on homogeneous and heterogeneous swarms of agents, we study the flocking motion problem for a group of agents with limited communication/sensing radius and heterogeneous input constraints. We propose distributed controllers to achieve both leaderless and leader-followers flocking motion. Our designs preserve network connections and satisfy individual control effort bounds. The designed controllers allow for agents with higher capabilities to compensate for the control effort that less capable neighbors cannot fulfill.
Recommended citation: Eber Jafet Ávila-Martínez and Juan Gonzalo Barajas-Ramírez. (2021). "Flocking motion in swarms with limited sensing radius and heterogeneous input constraints" Journal of the Franklin Institute. 358(4).
Published in Advanced Robotics, 2022
Motivated by the existing work on homogeneous and heterogeneous swarms of agents, we study the flocking motion problem for a group of agents with limited communication/sensing radius and heterogeneous input constraints. We propose distributed controllers to achieve both leaderless and leader-followers flocking motion. Our designs preserve network connections, satisfy individual control effort bounds and avoid nearby obstacles. The designed controllers allow for agents with higher capabilities to compensate for the control effort that less capable neighbors cannot fulfill.
Recommended citation: Eber Jafet Ávila-Martínez. (2022). "Obstacle avoidance flocking motion in multi-agent systems with limited sensing radius and heterogeneous input constraints" Advanced Robotics.
Published in Advanced Robotics, 2022
In this paper, we study the synchronization problem in complex dynamic networks of Piece Wise Linear (PWL) systems. PWL systems exhibit multi-scrolls and belong to a special class of Unstable Dissipative Systems (UDS). We consider strongly connected digraphs and linear diffusive couplings. The synchronization regions are computed using the concept of disagreement vectors, generalized algebraic connectivity of the network topology, and Lyapunov functions, which provide lower bounds on the coupling gain of the network. Then, different combinations of linear diffusive coupling are explored by changing the observed and measured variables to illustrate the contribution of our results. The theoretical results are validated by numerical simulations.
Recommended citation: Eber J. Ávila-Martínez, José L. Echenausía-Monroy and Adriana Ruiz-Silva. (2022). "Multi-scroll systems synchronization on strongly connected digraphs; Chaos Theory and Applications. Vol. 4, No. 4, pp. 205-211
Published:
Resumen: El presente trabajo estudia el problema de consenso y consenso con un líder virtual en sistemas multiagente con modelos inerciales. Primero, presentamos el modelo de agentes inerciales y discutimos algunas propiedades de una matriz de conexiones tipo Laplaciana que considera las inercias de cada uno de los agentes en el grupo. Posteriormente, se introduce un algoritmo de consenso y se dan condiciones necesarias y sufcientes bajo las cuales el estado de consenso es alcanzado cuando la estructura de comunicación contiene un árbol de expansión dirigido. Luego, el problema de consenso con un líder virtual no lineal es estudiado. Se propone un algoritmo de consenso que incluye los efectos de las inercias de los agentes. Condiciones necesarias y sufcientes sobre la estructura de comunicación entre agentes y el líder virtual tales que el grupo asintóticamente siguen al líder son dadas. Simulaciones numéricas son presentadas para ilustrar los resultados del análisis teórico.
Published:
Abstract: We propose two distributed controller solutions to leader-followers consensus problem on inertial multiagent systems that guarantee connectivity preservation based on articial potential functions. On the frst one, we consider a virtual leader which has a fixed, or constant velocity, with consensus defned as a position reference to be tracked. On the second, leader’s velocity is time-varying. In both cases, we consider that only a subset of agents have access to leader’s state information. Effectiveness of proposed controllers is illustrated with numerical simulations.
Published:
Abstract: In this work, we study the synchronization problem in complex dynamic networks of Piece Wise Linear (PWL) systems. PWL systems exhibit multi-scrolls and belong to a special class of Unstable Dissipative Systems (UDS). We consider strongly connected directed networks and linear diffusive couplings. The synchronization regions are computed using the concept of disagreement vectoars, generalized algebraic connectivity of the network topology, and Lyapunov functions, which provide lower bounds for the network’s coupling gain. Then, different combinations of linear diffusive coupling are explored by changing the observed and measured variables to illustrate the contribution of our results. The theoretical results are validated by numerical simulations.
Published:
Resume: We investigate the coordinated motion of a multi-agent system with heterogeneous distance-dependent communication constraints. In this setup, the underlying interaction network is dynamic since edges appear or disappear as the agents navigate their workspace. Inspired by the gradient-descent method, we provide a distributed controller which preserves the position-dependent communication network connectivity properties. We use a distributed connectivity measure based on the entries of the first-left eigenvector of the network’s associated Laplacian matrix to provide the agents with local knowledge of the overall network topology and reveal its dynamics properties. We illustrate our result with a numerical simulation.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.